AM600 配合绝对值带旋转周期功能轴实际位置反馈异常问题分析
当机械齿轮不能被256整除的时候,将会出现3S计算方法与620N绝对值旋转周期模式的兼容性问题。
解决方法
1、自定义实际位置反馈计算fActPosition,根据对象字典16#6064和Axis.iRatioTechUnitsNum,Axis.dwRatioTechUnitsDenom三个变量计算,
计算公式:
fActPosition = 16#6064 * Axis.iRatioTechUnitsNum / Axis.dwRatioTechUnitsDenom;
2、更改缩放比、启动参数配置电子齿轮比。恢复缩放比,并将减速比值设置到电子齿轮比。
例如:
现场需求缩放比如下图,缩放比16#800000 * 5 :360

电子齿轮比为1:1(16#6091:01、16#6091:02)

正确配置:
更改缩放比为16#800000 : 360。
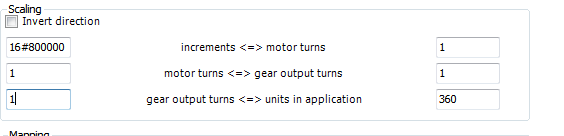
电子齿轮比为5:1(16#6091:01、16#6091:02),

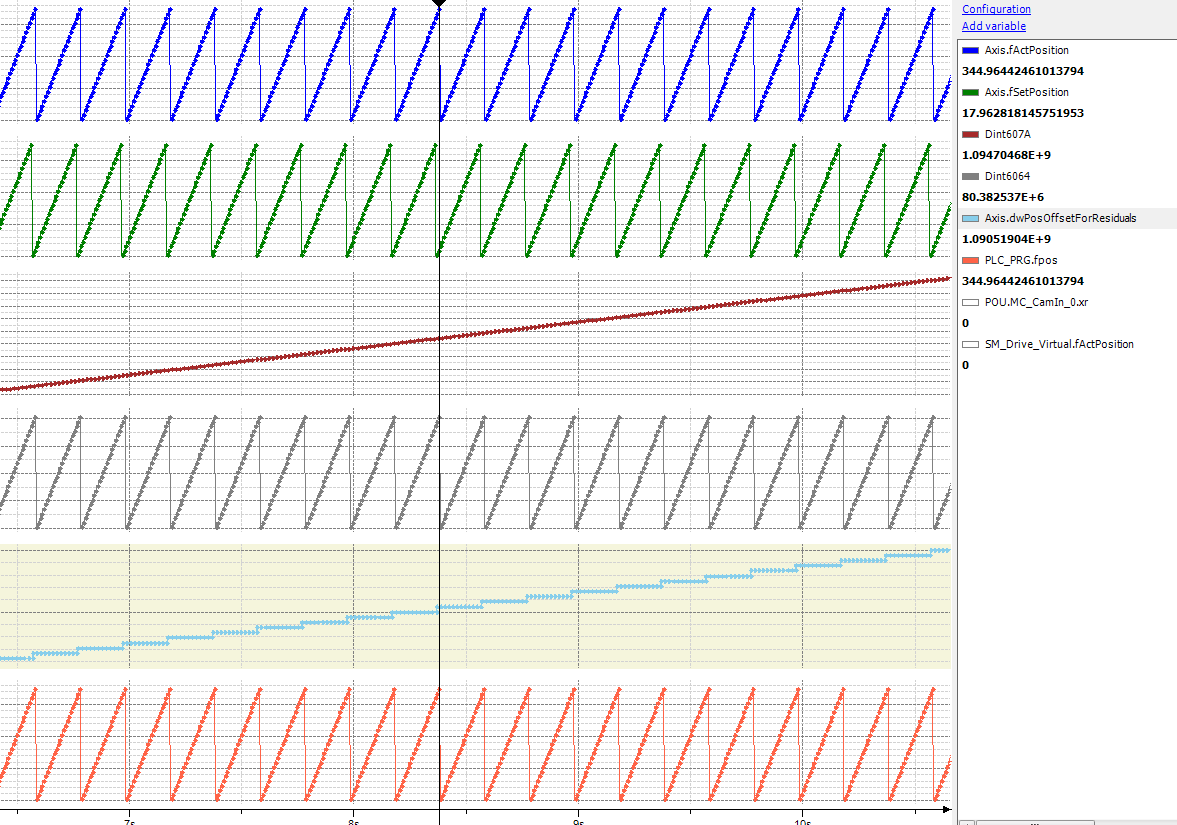
正常下波形如下:
绝对值伺服旋转周期模式配合PLC使用方法。
- 设置伺服电机模式2000-00=14101(23bit绝对值电机)。
- 设置伺服工作模式:2002-01=2(绝对位置旋转模式)。
- 设置伺服的机械齿轮比参数(2005-50、2005-51)。
- 设置后台缩放比例。
举例:机械转动1圈,电机实际旋转10圈。
按照步骤
a.设置伺服电机模式2000-00=14101(23bit绝对值电机)。
b.设置伺服工作模式:2002-01=2(绝对位置旋转模式)
c.设置伺服的机械齿轮比参数2005-50 = 10、2005-51 = 1。
d.后台配置如下:

如果需要使用轴的实际位置,请用文中提到的解决方法1。
