AM600总线运动控制程序编写要求
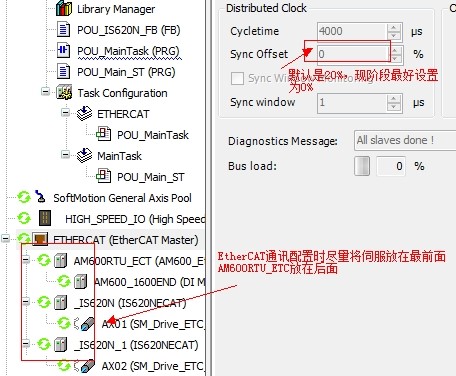
- 最好把Sync Offset设置为0%
- 伺服和AM600RTU_ETC通讯模块同时存在时最好将伺服放在前面
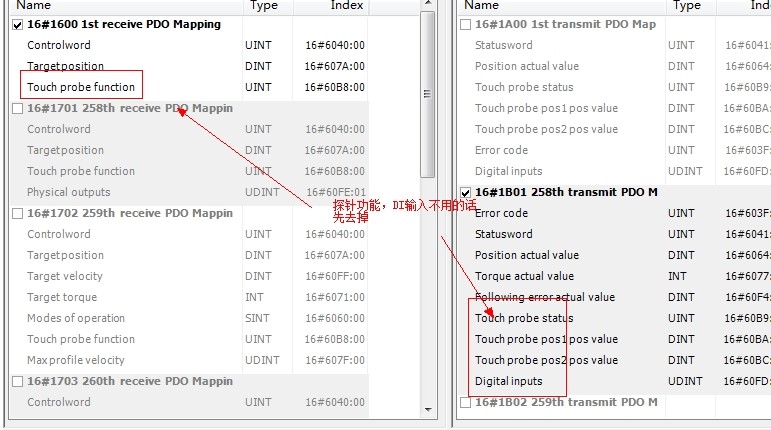
- 尽量只添加必要的PDO
- 将EtherCAT.DCInSyncWindow值改大
- EtherCAT任务里的POU程序尽量简单,比如程序中不用MC_ReadActualVelocity这些读指令,直接用轴结构下的变量如Axis.fActVelocity能获取到同样的值,尽量将运动控制无关的运算、指令移到其他任务下,保证EtherCAT任务执行时间最少
查看任务执行时间方法:

注意总线配置阶段最大循环时间会比较大,配置阶段循环时间对伺服控制是没有影响。在从站运行到op模式后右键-复位时间再监控,此时再判断(Max.cycle Time)+(Max. Jitter)<( DC Cycle Time)* (Sync Offset)是否成立,如果不满足则要调大DC时钟周期,优化程序等。
使用自定义PDO,保留必须的数据,删除不必要数据