MC_Jog指令问题
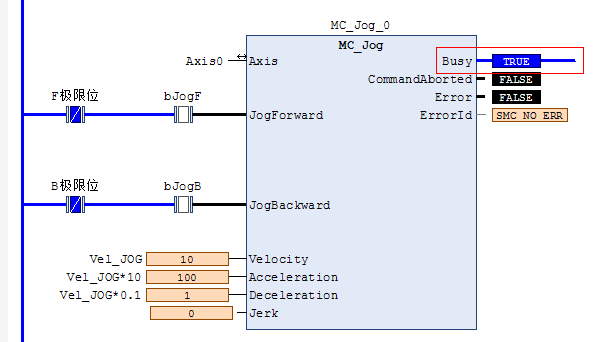
JOG指令在 断开使能 → Busy信号复位 这段时间内限位开关有效,伺服停止运行,PLC根据通讯读回的Digital Inputs值判断伺服撞到限位轴错误停止,然后报SMC_DI_HWLIMITS_EXCEEDED。
此种情况下软件内部处理逻辑异常busy一直为ON,不能再控制JOG指令。
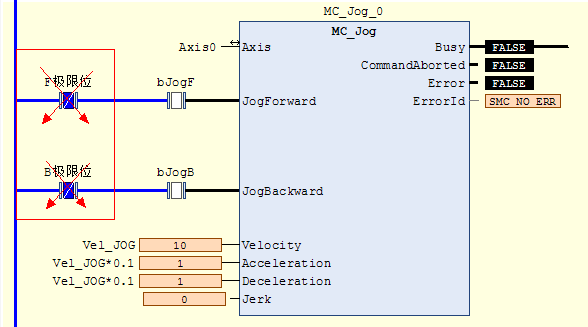
(正常情况:JogForward /JogBackward为ON时Busy 为TRUE,JogForward /JogBackward为 FALSE,轴减速到0停止,轴状态切换为standstill 状态,Busy 将会被设置为 FALSE)
目前的两种规避方法:
一)使用公司提供的功能块MC_JOG_HC
添加库MC_JOG_HC.library,用MC_JOG_HC替换MC_JOG,附件为库文件和详细
二)或者按如下方式操作,还是使用功能MC_JOG
1)JOG指令不串限位开关;
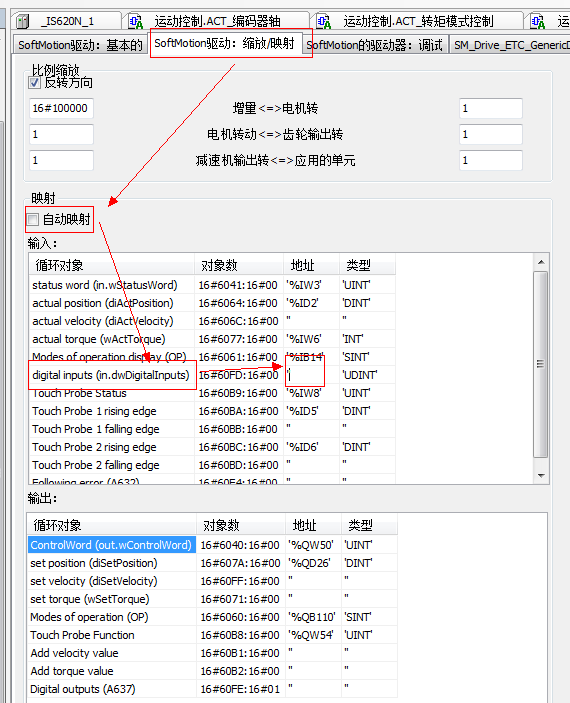
2)去掉输入过程数据的Digital Inputs(16#60FD:00),伺服限位开关是否有效通过ErrorCode(16#603F:00)=16#5443/5444(正向超程/反向超程)判断。

PS:如果PLC必须采集伺服Digital Inputs信号,有要保证目前情况下JOG能用,在轴参数设置 去掉自动映射—输入参数将Digital Inputs对应地址删除
3)ErrorCode检测到伺服撞限位后人为断开JOG指令使能,JOG减速停止,不会报错。
4)JOG减速停止时伺服已停止了,所以该轴的设置值与当前值不等(factposition<>fsetposition),会影响轴的后续控制。需使用SMC_FollowPosition将设置值改为与当前值一致。
