SMC_HOMING控制器回零、MC_HOME伺服回零:
AM600提供两种回零方式,MC_HOME为驱动器回零,SMC_HOMING控制器回零。如果对回零精度要求很高请用MC_HOME。
1、MC_HOME
MC_HOME需先配置伺服的回零方式、回零速度等。程序触发MC_HOME PLC只是将伺服运行模块改为回零模式,启动回零,等待伺服自己回零,反馈完成信号,然后将模式切换为回零前的控制模式。具体的回零方式参照伺服手册。
MC_HOME使用方法:
以620N为例:
- 根据实际设备选择合适的原点回零方式(620N支持33种,详细请查看620N手册);
- 将左右极限位、原点开关接到伺服(以回零模式5举例)。
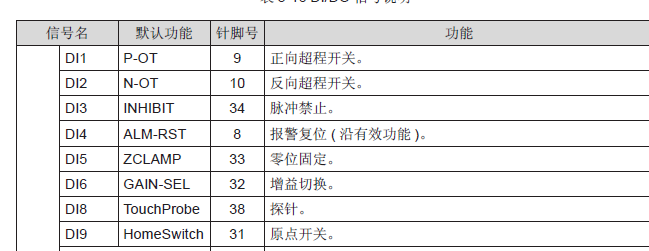
伺服DI信号说明
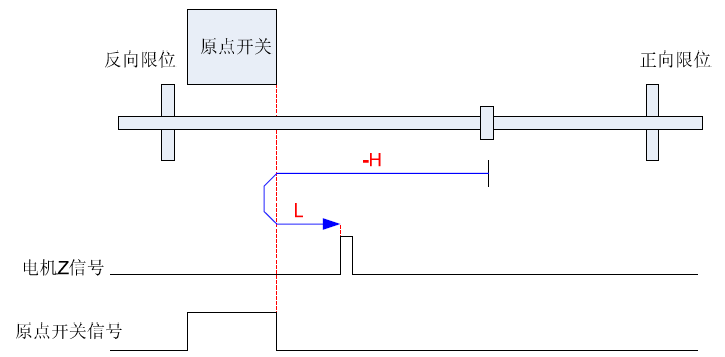
模式5回零操作介绍
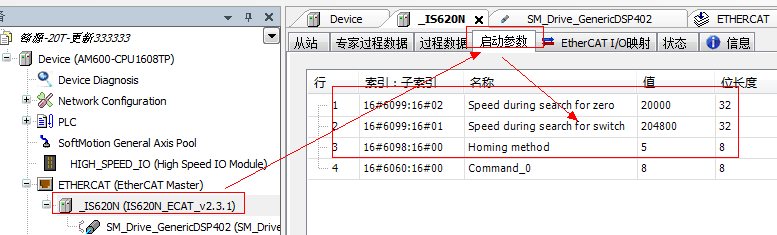
1.3.在AM600软件中通过如下方式设置伺服的回零方式和回零速度
1.4.调用MC_Power使能伺服。
1.5.伺服使能后调用MC_HOME指令,输出Done为ON表示回零完成。
注意:1.AM600软件启动参数处设置的回零速度值为伺服脉冲数,不是应用单位;
2.如果伺服原点开关有效后没有反向减速停止请检查DI接线和DI分配是否正确;
3.如果长时间检测不到极限信号或原点信号,MC_Home指令扫描65535次后会报错;
4.伺服使能前,不能执行MC_Home指令;
以上是将极限、原点信号线接在伺服上的使用方法,如果信号线已经接在PLC上时该如何使用呢。只需要将上面第1.2、1.3步改为如下。
- 将左右极限位、原点开关改为接到PLC;
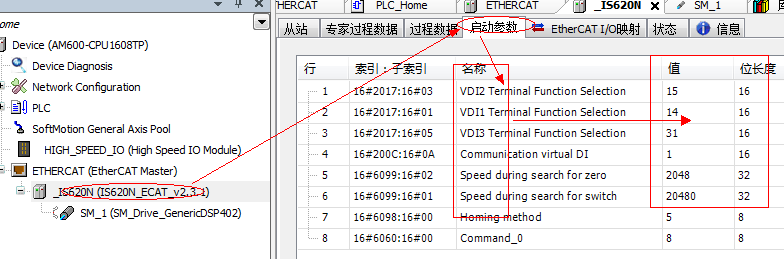
- 在按照如下设置虚拟DI端口,回零模式等;
C)按如下步骤把虚拟DI端口对象加到PDO中
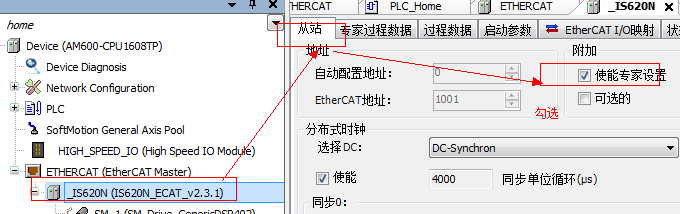
勾选使能专家设置
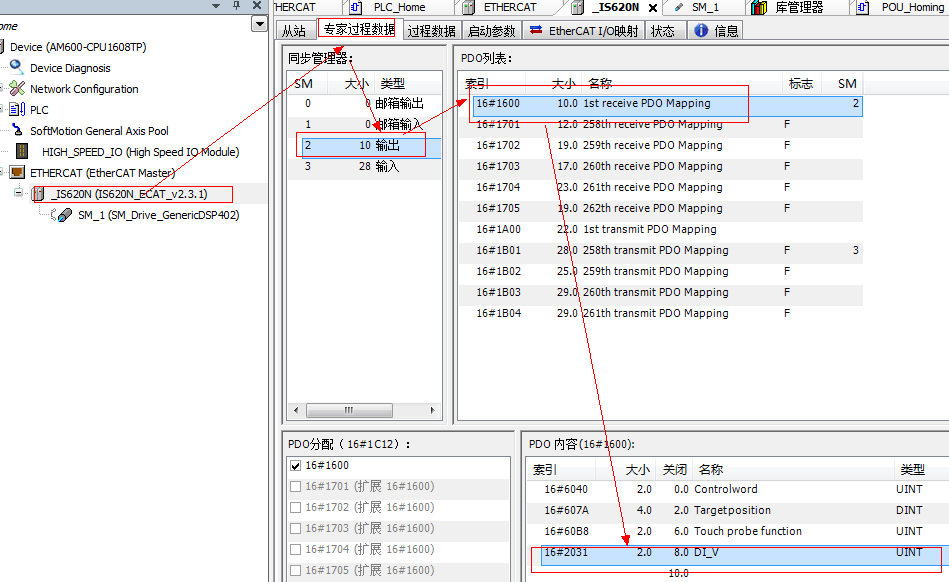
把虚拟端口对象索引(2031.01)添加到1600 PDO列表中,注意VDI索引为2031,子索引为01,数据类型为Uint。
过程数据TxPDO选择1600


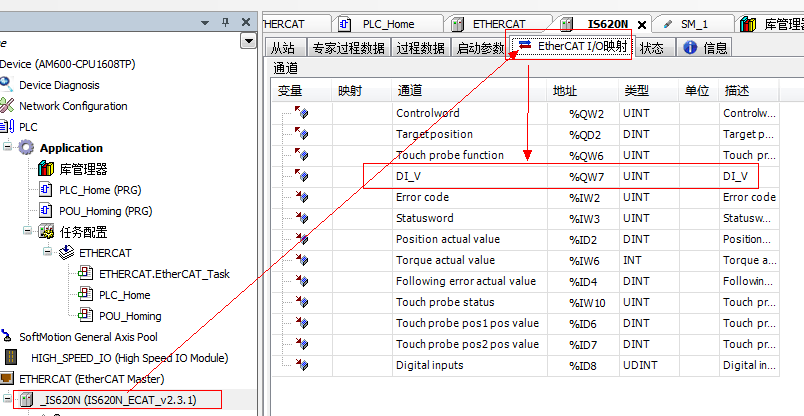
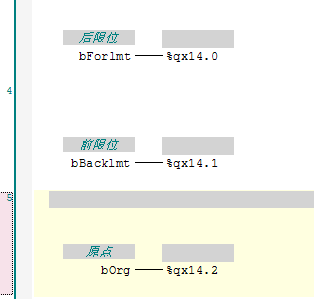
查看系统分配给虚拟DI的地址,将限位、原点信号赋值给DI地址
2、SMC_HOMING
SMC_HOMING通过 bExecute的上升沿启动之后,轴将会按照速度 fVelocityFast 并以nDirection定义的方向开始运动,直到 bReferenceSwitch = FALSE。然后轴将会缓慢停止并按照相反的方向以速度 fVelocitySlow离开参考开关。bReferenceSwitch = TRUE后回零完成,设置参考位置。
注意:SMC_HOMING是控制器控制回零,回零完成后的当前位置是控制器设置的位置,不等于伺服编码器值。重新上电或初始化轴后位置可能发生变化。
SMC_HOMING使用方法:
如下图:
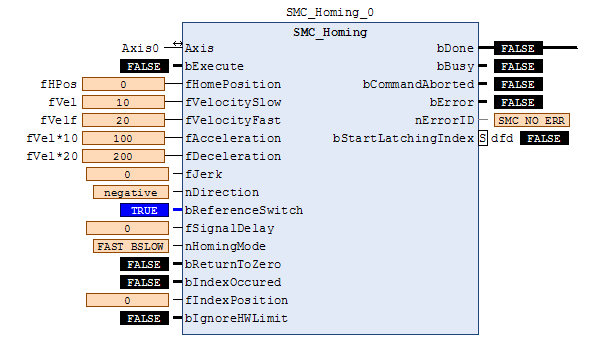
- 使能回零指令后bReferenceSwitch的状态为ON->OFF->ON,在OFF->ON的上升沿回零完成,设置参考位置。
参考位置=fHomePostion+((fSignalDelay_1000+1个DC时钟周期)/1000)_fVelocitySlow
实际就是补偿了设置的bReferenceSwitch采样延迟和一个通讯周期位移延迟。
- 如果bReturnToZero=TRUE,bReferenceSwitch的状态在OFF->ON的上升沿将参考位置设置为fHomePostion+((fSignalDelay_1000+1个DC时钟周期)/1000)_fVelocitySlow,然后按照速度fVelocityFast运行到0位置。