本文由汇川技术工程师编写,由Julius_wen发布
1、概述
1.1、背景
变频器在张力控制领域已有广泛的应用,但对于某些要求精度更高,响应更快,电机速度较低等场合,使用伺服进行张力控制会更有优势。本非标用于卷曲控制,可以自动计算卷径,在卷径变化时仍能够达到获取恒张力的效果。
1.2、参考文献
1、.《MD330张力控制专用变频》
2、《IS620P伺服用户综合手册》
2、张力控制原理介绍
2.1、闭环张力控制示意图
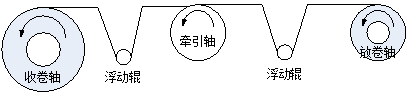 (a)闭环张力控制示意图
(a)闭环张力控制示意图
2.2、张力控制方案介绍
常用的张力控制有两种方式,一是控制电机的输出转矩,二是控制电机的转速。针对这两种方法,市场上存在两种张力控制模式:开环张力控制和闭环张力控制。开环张力控制是指没有张力反馈信号,驱动器仅靠控制电机转速或转矩来达到控制目的,而闭环张力控制需要张力(位置)反馈装置,驱动器靠调节电机运行速度来达到控制目的。本非标只支持张力闭环控制。
2.3、闭环张力相关功能模块
(1)PID部分:
主要包括PID指令源,反馈源设定,PID调节参数, PID输出结果处理。
(2)卷径计算部分:
伺服驱动器根据牵引轴的线速度,收/放卷轴当前的角速度实时计算卷径。硬件接线,需要将牵引轴的分频输出,分别收/放卷轴的低速脉冲口。
3、功能码表
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H02.00 |
控制模式选择 |
|
1 |
0 |
停机设定 |
|
H03.68 |
AI1最小输入 |
-10.00~10.00 |
0.01 |
0.00 |
运行设定 |
|
H03.69 |
AI1最小输入对应百分比 |
-100.0%~-0.1% |
0.1% |
100.0% |
运行设定 |
|
H03.70 |
AI1最大输入 |
-10.00~10.00 |
0.01 |
10.00 |
运行设定 |
|
H03.71 |
AI1最大输入对应百分比 |
0.1%~100.0% |
0.1% |
100.0% |
运行设定 |
|
H03.72 |
AI2最小输入 |
-10.00~10.00 |
0.01 |
0.00 |
运行设定 |
|
H03.73 |
AI2最小输入对应百分比 |
-100.0%~-0.1% |
0.1% |
100.0% |
运行设定 |
|
H03.74 |
AI2最大输入 |
-10.00~10.00 |
0.01 |
10.00 |
运行设定 |
|
H03.75 |
AI2最大输入对应百分比 |
0.1%~100.0% |
0.1% |
100.0% |
运行设定 |
|
H06.00 |
主速度指令A来源 |
0:数字给定 1:AI1 2:AI2 3:张力模式 |
1 |
3 |
停机设定 |
|
H10.00 |
PID键盘指令值 |
-100.0%~100.0% |
0.1% |
0 |
运行设定 |
|
H10.01 |
PID指令来源选择 |
0:键盘设定 1:AI1 2:AI2 |
1 |
0 |
停机设定 |
|
H10.02 |
反馈源选择 |
1:AI1 2:AI2 |
1 |
1 |
停机设定 |
|
H10.03 |
PID指令滤波时间常数 |
0~1000.0 |
0.1ms |
5 |
运行设定 |
|
H03.51 |
AI1输入滤波时间 |
0~655.35 |
0.01ms |
2.00 |
运行设定 |
|
H03.56 |
AI2输入滤波时间 |
0~655.35 |
0.01ms |
2.00 |
运行设定 |
|
H10.04 |
PID逻辑 |
0:正逻辑 1:反逻辑 |
1 |
0 |
停机设定 |
|
H10.05 |
比例分子 |
1~1073741824 |
1 |
6 |
停机设定 |
|
H10.07 |
比例分母 |
1~1073741824 |
1 |
1000 |
停机设定 |
|
H06.08 |
速度正向限制 |
0~9000 |
1rpm |
1000 |
运行设定 |
|
H06.09 |
速度反向限制 |
0~9000 |
1rpm |
1000 |
运行设定 |
|
H10.09 |
PID输出时间常数 |
0~1000.0 |
0.1ms |
0 |
运行设定 |
|
H10.10 |
给定和传感器量程值 |
1.0%~1000.0% |
0.1% |
100.0% |
停机设定 |
|
H10.12 |
卷径计算信号来源 |
0:内部计算 1:AI1 2:AI2 |
1 |
0 |
停机设定 |
|
H10.10 |
卷径量程值 |
0.00%~200.00% |
0.01% |
100.00% |
停机设定 |
|
H10.23 |
PID比例增益1 |
0~2000.0 |
0.1HZ |
25.0 |
运行设定 |
|
H10.24 |
PID积分时间1 |
1.0~2000.0 |
0.1ms |
30.0 |
运行设定 |
|
H10.25 |
PID微分增益1 |
0~20000 |
1/S |
0 |
运行设定 |
|
H10.26 |
PID比例增益2 |
0~2000.0 |
0.1HZ |
25.0 |
运行设定 |
|
H10.27 |
PID积分时间2 |
1.0~2000.0 |
0.1ms |
30.0 |
运行设定 |
|
H10.28 |
PID微分增益2 |
0~20000 |
1/S |
0 |
运行设定 |
|
H10.29 |
增益切换条件 |
0:固定为第一增益 1:根据DI切换 2:根据偏差切换 3:根据PID输出大小 |
1 |
0 |
运行设定 |
|
H10.31 |
增益切换等级 |
0~20000 |
1rpm |
50 |
运行设定 |
|
H10.32 |
增益切换时滞 |
0~20000 |
1rpm |
30 |
运行设定 |
|
H10.34 |
卷曲模式 |
0:收卷 1:放卷 2:牵引 |
1 |
0 |
运行设定 |
|
H10.35 |
牵引轴直径 |
1.00~655.35 |
0.01mm |
97.02 |
停机设定 |
|
H10.36 |
牵引轴减速比分子 |
1~10000 |
1 |
1 |
停机设定 |
|
H10.37 |
牵引轴减速比分母 |
1~10000 |
1 |
1 |
停机设定 |
|
H10.38 |
收/放卷轴初始卷径 |
1.0~6553.5 |
0.1mm |
10.0 |
运行设定 |
|
H10.39 |
收/放卷轴实时卷径 |
1.0~6553.5 |
0.1mm |
10.0 |
显示 |
|
H10.40 |
收/放卷轴减速比分子 |
1~10000 |
1 |
1 |
停机设定 |
|
H10.41 |
收/放卷轴减速比分母 |
1~10000 |
1 |
1 |
停机设定 |
|
H10.44 |
最小卷径 |
0.1~6553.5 |
0.1mm |
10.0 |
运行设定 |
|
H10.45 |
最大卷径 |
0.1~6553.5 |
0.1mm |
1000.0 |
运行设定 |
|
H10.46 |
牵引轴分频脉冲数 |
1~1073741824 |
1 |
10000 |
停机设定 |
|
H10.48 |
卷径复位 |
0:不复位 1:H10.38,67,68,69可选 2:AI1 3:AI2 4:立即复位 |
1 |
0 |
运行设定 |
|
H10.49 |
补偿方向 |
0~1 |
1 |
0 |
停机设定 |
|
H10.50 |
卷径计算滤波时间 |
0~1000.0 |
0.1ms |
30.0 |
运行设定 |
|
H10.52 |
速度滤波截止频率 |
100~4000 |
1HZ |
500 |
运行设定 |
|
H10.53 |
材料厚度 |
1~500.0 |
0.1mm |
2.0 |
运行设定 |
|
H10.54 |
补偿百分比 |
0%~100.0% |
0.1% |
0 |
停机设定 |
|
H10.55 |
卷径平均滤波次数 |
0~7 |
1 |
3 |
停机设定 |
|
H10.57 |
牵引轴速度平均滤波次数 |
0~7 |
1 |
4 |
停机设定 |
|
H10.58 |
惯量比显示值 |
0~50000 |
1 |
100 |
运行设定 |
|
H10.67 |
收/放卷轴初始卷径1 |
1.0~6553.5 |
0.1mm |
10.0 |
运行设定 |
|
H10.68 |
收/放卷轴初始卷径2 |
1.0~6553.5 |
0.1mm |
10.0 |
运行设定 |
|
H10.69 |
收/放卷轴初始卷径3 |
1.0~6553.5 |
0.1mm |
10.0 |
运行设定 |
4、功能码说明
4.1、PID输入部分
4.1.0、张力控制模式
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H02.00 |
控制模式选择 |
|
1 |
0 |
停机设定 |
|
H06.00 |
主速度指令A来源 |
0:数字给定 1:AI1 2:AI2 3:张力模式 |
1 |
3 |
停机设定 |
开启张力控制模式需要将H02.00设置成0,H0600设置成3,程序默认设为开启张力模式。
4.1.1、PID指令源选择
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H10.00 |
PID键盘指令值 |
-100.0%~100.0% |
0.1% |
0 |
运行设定 |
|
H10.01 |
PID指令来源选择 |
0:键盘设定 1:AI1 2:AI2 |
1 |
0 |
停机设定 |
-
H10.01设定为0,则PID指令来源于H10.00所设定的的数字量。
-
H10.01设定为1,则 PID指令源来源于外部AI1。
-
H10.01设定,为2,则PID指令源来源于外部AI2。
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H03.68 |
AI1最小输入 |
-10.00~10.00 |
0.01 |
0.00 |
运行设定 |
|
H03.69 |
AI1最小输入对应百分比 |
-100.0%~-0.1% |
0.1% |
100.0% |
运行设定 |
|
H03.70 |
AI1最大输入 |
-10.00~10.00 |
0.01 |
10.00 |
运行设定 |
|
H03.71 |
AI1最大输入对应百分比 |
0.1%~100.0% |
0.1% |
00.0% |
运行设定 |
|
H03.72 |
AI2最小输入 |
-10.00~10.00 |
0.01 |
0.00 |
运行设定 |
|
H03.73 |
AI2最小输入对应百分比 |
-100.0%~-0.1 |
0.1% |
100.0% |
运行设定 |
|
H03.74 |
AI2最大输入 |
-10.00~10.00 |
0.01 |
10.00 |
运行设定 |
|
H03.75 |
AI2最大输入对应百分比 |
0.1%~100.0% |
0.1% |
00.0% |
运行设定 |
AI1和AI2可通过上述设定功能码将采样值对应到百分数,设定最大值必须大于最小值。
4.1.2、PID指令标定
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H10.10 |
给定和传感器量程值 |
1.0%~1000.0% |
0.1% |
100.0% |
停机设定 |
H10.10将PID指令和反馈值标定成实际物理值的百分比,对应关系如下缩放?:
-
若H10.01=0,100%的键盘设定值对应H10.10设定的物理值的百分比。
-
若H10.01=1或2,模拟量10V对应的电压对应H10.10设定的物理值百分比。
4.2、PID反馈部分
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H10.02 |
反馈源选择 |
1:AI1 2:AI2 |
1 |
1 |
停机设定 |
反馈源选定后,相应模拟量通道值经过H10.10标定后直接进入PID运算部分。
4.3、PID控制部分
4.3.0、PID指令滤波
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H10.03 |
PID指令滤波时间常数 |
0~1000.0 |
0.1ms |
0.5 |
运行设定 |
PID指令若存在突变,将导致电机快速加速,未避免电机运动过于剧烈,增加H10.03,对PID指令进行平滑处理,滤波越大造成一定的响应延迟越大。
4.3.1、PID反馈滤波
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H03.51 |
AI1输入滤波时间 |
0~655.36 |
0.01ms |
2.00 |
运行设定 |
|
H03.56 |
AI2输入滤波时间 |
0~655.36 |
0.01ms |
2.00 |
运行设定 |
传感器存在测量噪声,防止该噪声耦合到PID控制部分,平台软件中对AI1,AI2通道增加了滤波功能。同理,平台软件中对AI的处理在本非标中一样有效。
4.3.2、PID控制逻辑
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H10.04 |
PID逻辑 |
0:正逻辑 1:反逻辑 |
1 |
0 |
停机设定 |
正逻辑:指令值大于PID反馈值时,PID输出正的转速指令,电机正向转动。
负逻辑:由于现场传动机构的原因,可能会当指令大于反馈值时,电机需要反转,指令小于反馈值时,电机需要正转的情况。13775716153.
4.3.3、PID控制参数
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H10.05 |
控制比例分子 |
1~1073741824 |
1 |
6 |
停机设定 |
|
H10.07 |
控制比例分母 |
1~1073741824 |
1 |
1000 |
停机设定 |
|
H10.23 |
PID比例增益1 |
0~2000.0 |
0.1HZ |
25.0 |
运行设定 |
|
H10.24 |
PID积分时间1 |
1.0~2000.0 |
0.1ms |
30.0 |
运行设定 |
|
H10.25 |
PID微分增益1 |
0~20000 |
1/S |
0 |
运行设定 |
考虑到张力控制各场合的传动机构(减速比)各不相同,需要使用控制比例因子(包括分子和分母)将PID输入指令和内部PID运算之间的物理关系相关联。调试过程中先可以不设置控制比例因子,调试过程中发现PID的调节参数过小,或者调节步长小但作用效果差异大,就可以设置比例因子,默认比例因子为6:1000。
4.3.4、PID输出限幅
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H06.08 |
速度正向限制 |
0~9000 |
1rpm |
1000 |
停机设定 |
|
H06.09 |
速度反向限制 |
0~9000 |
1rpm |
1000 |
停机设定 |
在很多应用场合需要限制PID的输出,特别是电机反向旋转速度。本非标提供PID正向和反向分别限幅。注意第一次设定PID逻辑时请将PID输出正/反限幅设置到安全值,确保不会损坏机械设备。
4.3.5、PID输出滤波
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H10.09 |
PID输出时间常数 |
0~1000.0 |
0.1ms |
0 |
运行设定 |
为使PID输出更加平滑,增加PID输出时间常数。该功能码越大平滑效果越好,但滞后也越大,过大的输出时间常数可能导致张力控制振荡。
4.3.6、增益切换
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H10.26 |
PID比例增益2 |
0~2000.0 |
0.1HZ |
25.0 |
运行设定 |
|
H10.27 |
PID积分时间2 |
1.0~2000.0 |
0.1ms |
30.0 |
运行设定 |
|
H10.28 |
PID微分增益2 |
0~20000 |
1/S |
0 |
运行设定 |
|
H10.29 |
增益切换条件 |
0:固定为第一增益 1:根据DI切换 2:根据偏差切换 3:根据PID输出大小 |
1/S |
0 |
运行设定 |
|
H10.31 |
增益切换等级 |
0~20000 |
1rpm |
50 |
运行设定 |
|
H10.32 |
增益切换时滞 |
0~20000 |
1rpm |
30 |
运行设定 |
考虑到1组PID无法满足现场应用,本非标支持张力PID增益切换功能:
- H10.29=0,不进行增益切换,默认无增益切换。
- H10.29=1,根据DI切换。需要设置DI为FunIN.40。该DI无效时选择第1组增益,该DI有效时选择第2组增益。
- H10.29=2,根据PID偏差切换。若PID控制偏差大于H10.31+H10.32,切换为第2增益,若PID控制偏差小于H10.31-H10.32切换为第1增益。偏差在H10.31+H10.32于H10.31-H10.32之间属于增益过渡区。
- H10.29=3,根据PID输出大小切换,若PID输出大于H10.31+H10.32,切换为第2增益,若PID输出小于H10.31-H10.32切换为第1增益。PID输出在H10.31+H10.32于H10.31-H10.32之间属于增益过渡区。
4.4、卷径计算部分
由于PID有一定适应性,一般张力闭环场合不需要使用卷径计算。如果现场响应要求较快、或者卷径变化大等情况下,需要进行卷径计算。本非标通过获取牵引轴的线速度和当前收/放卷轴的角速度即可计算当前卷径,也可以通过模拟量反馈来获得实时卷径。
H10.12=0时,需要将牵引轴伺服分频/编码器脉冲接入到收卷/放卷轴的低速脉冲口,请注意设置脉冲形式。
通过单位时间走过线长一定可以得出公式,然后就可以自动计算出卷轴的卷径。
计算公式:
 电机转速*减速比=减速机端转速
电机转速*减速比=减速机端转速
前馈速度*卷径*卷轴减速比=牵引轴速度*直径*减速比
H10.12=1或者2时,卷径等于AI1或者AI2模拟量对应值。
4.4.0、机械传动相关设定量
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H10.35 |
牵引轴直径 |
1.00~655.35 |
0.01mm |
9702 |
停机设定 |
|
H10.36 |
牵引轴减速比分子 |
1~10000 |
1 |
1 |
停机设定 |
|
H10.37 |
牵引轴减速比分母 |
1~10000 |
1 |
1 |
停机设定 |
|
H10.40 |
收/放卷轴减速比分子 |
1~10000 |
1 |
1 |
停机设定 |
|
H10.41 |
收/放卷轴减速比分母 |
1~10000 |
1 |
1 |
停机设定 |
|
H10.46 |
牵引轴分频脉冲数 |
1~1073741824 |
1 |
10000 |
停机设定 |
4.4.1、卷径计算辅助量
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H10.39 |
收/放卷轴实时卷径 |
1.0~6553.5 |
0.1mm |
10.0 |
显示 |
|
H10.44 |
最小卷径 |
1~65535 |
0.1mm |
10.0 |
运行设定 |
|
H10.45 |
最大卷径 |
1~65535 |
0.1mm |
1000.0 |
运行设定 |
|
H10.53 |
材料厚度 |
1~5000 |
0.1mm |
2.0 |
运行设定 |
|
H10.50 |
卷径计算滤波时间 |
0~10000 |
0.1ms |
30.0 |
运行设定 |
|
H10.55 |
卷径滑动波次数 |
0~7 |
1 |
3 |
停机设定 |
收/放卷轴实时卷径计算结果在H10.39中显示,考虑到实际材料存在打滑或者控制不稳定的情况,会导致计算卷径瞬时值不正确,客户设置正确的H10.44、H10.45、H10.53可以有助于剔除错误的卷径值,使卷径计算值趋于真实物理值。为使卷径计算结果平滑,增加了H10.50卷径计算滤波和H10.55卷径滑动滤波。
4.4.2、卷径复位
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H10.48 |
卷径复位 |
0:不复位 1:H10.38,67,68,69可选 2:AI1 3:AI2 4:卷径立即复位 |
1 |
0 |
运行设定 |
|
H10.38 |
收/放卷轴初始卷径 |
1.0~6553.5 |
0.1mm |
10.0 |
运行设定 |
收卷满卷或放卷空卷时需要换卷,换卷后外部需要进行卷径复位,本非标支持两种卷径复位方式:
(1)将DI端口配置成FunIN.30,伺服检测到该端口出现上升沿复位卷径。
1:H10.38,67,68,69决定。
2:AI1 3:AI2初始卷径通过模拟量来确定。
4:卷径立即复位
(2)功能码H10.48设4,当前卷径复位成初始卷径(H10.38),复位后即可正常工作,H10.48还原为0。
H10.48等于1时,卷径复位初始值可以通过两个多功能端子来确定,将DI端子分别配置为FunIN.41和FunIN.42,关系如下:
| FunIN.41 |
FunIN.42 |
初始卷径源 |
|
0 |
0 |
H10.38 |
|
1 |
0 |
H10.67 |
|
0 |
1 |
H10.68 |
|
1 |
1 |
H10.69 |
若不设置卷径复位,请先低速运行一段时间,确保程序已经识别当前真实卷径。
| H10.67 |
收/放卷轴初始卷径1 |
1.0~6553.5 |
0.1mm |
10.0 |
运行设定 |
|
H10.68 |
收/放卷轴初始卷径2 |
1.0~6553.5 |
0.1mm |
10.0 |
运行设定 |
|
H10.69 |
收/放卷轴初始卷径3 |
1.0~6553.5 |
0.1mm |
10.0 |
运行设定 |
4.4.3、前馈速度指令
| 功能码 |
名称 |
设定范围 |
最小单位 |
出厂值 |
生效方式 |
|
H10.49 |
补偿方向 |
0~1 |
1 |
0 |
停机设定 |
|
H10.54 |
补偿百分比 |
0~100.0% |
0.1% |
0 |
停机设定 |
|
H10.52 |
牵引轴速度滤波截止频率 |
100~4000 |
1 |
500 |
运行设定 |
|
H10.57 |
牵引轴速度平均滤波次数 |
0~7 |
1 |
4 |
停机设定 |
从张力控制示意(a)可知,若收/放卷要保持恒定张力,收/放卷轴的线速度必须等于牵引轴的线速度。若使用卷径计算,电机当前运行速度指令就等于牵引轴的前馈速度和PID反馈调节输出之和,牵引轴的线速度作为张力控制速度前馈。牵引轴电机运行方向和收/放轴安装方式取决于用于机械,若安装方向相反请使用H10.49修改前馈速度的方向。前馈补偿比例为H10.54,恰当的前馈有利于张力快速稳定,但考虑速度反馈有噪声,增加H10.52,H10.57对反馈速度进行滤波.
补偿方向确定步骤:
若主轴电机逆时针运行,张力轴也需要逆时针运行,则H10.49设0,若张力轴需要顺时针运行,则H10.49设1。反之则相反。此外H10.54等于0的情况下,若速度指令与后台软件中FUNC测试3方向相同,则H10.49设置成0,若速度指令与FUNC测试3方向相反,则H10.49设置成1.
5、后台说明
5.1、后台数据库
将数据库IS620P&600P_张力非标1.0.mdb加入到后台安装文件中data文件夹中,并在后台中选取该文件。
5.2、后台示波器
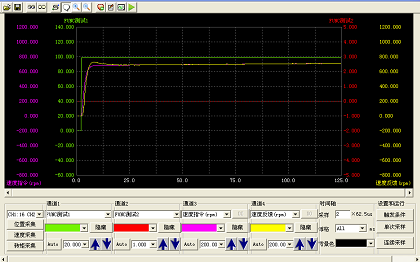 图中,给出1V指令,反馈为0,电机处于加速状态以期减小张力偏差。
图中,给出1V指令,反馈为0,电机处于加速状态以期减小张力偏差。
(1)FUNC测试1是张力指令(滤波后的值)未使能时该值为0,使能后该值为设定值,单位0.01V。
(2)FUNC测试2是张力反馈值,单位0.01V。
(3)FUNC测试3是牵引轴速度,单位0.1rpm(此示意图中未示出)。
FUNC测试1:PID给定值 0.01V
FUNC测试2:模拟量反馈值 0.01V
FUNC测试3:PID输出对应速度值 0.1RPM
FUNC测试4:前馈对应速度值 0.1RPM
速度指令=反馈速度对应值+前馈速度对应值*补偿比6、附录
| 日期 |
变更后版本 |
变更内容 |
|
2014-12-25 |
V1.0 |
新建 |
|
2015-5-7 |
V3.0 |
增加卷径计算 |
|
2015-09-08 |
V3.1 |
文档修改,卷径复位,AI取值 |
转载请注明:燕骏博客 » 汇川技术张力非标伺服张力控制
赞赏作者 微信赞赏
微信赞赏 支付宝赞赏
支付宝赞赏