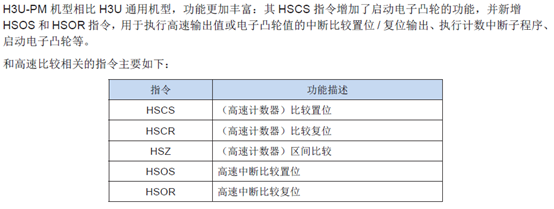
H3U运动控制功能说明
注:本文档由汇川工程师总结,由Julius_wen发布到燕骏博客
1、此文档指令需要AutoShop V2.62.03以上版本支持编辑和上下载。
2、此文档功能需要单板软件24305-B027和FPGA 387xxxxx或单板软件25305-B019和FPGA 386xxxxx以上版本支持。FPGA版本可由D8022(32位数据)查看。
3、本文仅说明部分新增功能,其它标准功能及应用可查看H3U编程手册。
| 机型 |
标准H3u-0808PMRTA |
H3u-0808PMRTA FPGA非标 |
适用H3u-1616、H3u-3232机型 |
|
FPGA版本 |
384xx-xxx(38402003) |
386xx-xxx(38602005) |
387xx-xxx(38702008) |
|
插补功能 |
支持 |
不支持 |
不支持 |
|
电子凸轮 |
3轴 |
3轴 |
3轴 |
|
防主轴脉冲抖动 |
支持 |
支持 |
支持 |
|
主轴方向和运行方式设定 |
不支持 |
支持 |
支持 |
|
主轴偏移启动 |
不支持 |
支持 |
支持 |
|
运动叠加 |
不支持 |
支持 |
支持 |
|
计数器锁存 |
不支持 |
不支持 |
支持 |
|
计数器模数模式 |
不支持 |
不支持 |
支持 |
通用型H3U运动控制功能(H3u-1616MT、H3u-3232MT机型)
通用型H3U(H3u-1616MT、H3u-3232MT机型)刷非标软件后,具备3轴电子凸轮功能。更改后的非标版本具有如下特点:
1、支持3轴定位控制,输出方式可设定为脉冲+方向、CW/CCW;
2、支持3路高速计数,计数模式可设定为AB相1/4倍倍频、脉冲+方向、CW/CCW;
3、支持3轴电子凸轮
输入输出端子功能对应
输出功能
| 端子 |
功能 |
备注 |
|
Y0 |
第1轴(X轴)脉冲输出/CW信号输出 |
高速输出 |
|
Y1 |
第2轴(Y轴)脉冲输出/CW信号输出 |
高速输出 |
|
Y2 |
第3轴(Z轴)脉冲输出/CW信号输出 |
高速输出 |
|
Y3 |
第1轴(X轴)方向输出/CCW信号输出 |
高速输出 |
|
Y4 |
第2轴(Y轴)方向输出/CCW信号输出 |
高速输出 |
|
Y5 |
第3轴(Z轴)方向输出/CCW信号输出 |
普通输出 |
注:Y5为普通低速输出,第3轴(Z轴)方向输出/CCW信号输出占用Y5,若第3轴使用凸轮功能,且在凸轮的一个周期内需要切换方向,可能导致实际机构定位不准。
输入功能
1、计数器
| 计数器 |
端子 |
计数模式 |
计数器锁存输入 |
锁存值SD元件 |
|||
|
AB相 |
脉冲+方向 |
CW/CCW |
上升沿 |
下降沿 |
|||
|
C252 |
X0 |
A相输入 |
脉冲输入 |
CW脉冲输入 |
X6 |
SD65,SD64 |
SD67,SD66 |
|
X1 |
B相输入 |
方向输入 |
CCW脉冲输入 |
||||
|
C253 |
X2 |
A相输入 |
脉冲输入 |
CW脉冲输入 |
X7 |
SD165,SD164 |
SD167,SD166 |
|
X3 |
B相输入 |
方向输入 |
CCW脉冲输入 |
||||
|
C254 |
X4 |
A相输入 |
脉冲输入 |
CW脉冲输入 |
无 |
无 |
|
|
X5 |
B相输入 |
方向输入 |
CCW脉冲输入 |
||||
2、比较指令
输入相关的指令如下,具体使用说明可参考H3U编程手册。
同步输出可使用HSOS和HSOR配合实现。
3、输入中断
X0~X7可设置上升沿中断或下降沿中断。
X6和X7的边沿中断可分别锁存C252和C253的计数器值。
X0~X7的边沿中断会立即刷新凸轮主轴位置值。
4、特殊输入功能
| 端子 |
功能 |
备注1 |
备注1 |
|
X10 |
第1轴(X轴)start输入 |
普通输入 |
各轴start或stop功能不使用时,可作为普通输入使用 |
|
X11 |
第1轴(X轴)stop输入 |
普通输入 |
|
|
X12 |
第2轴(Y轴)start输入 |
普通输入 |
|
|
X13 |
第2轴(Y轴)stop输入 |
普通输入 |
|
|
X14 |
第3轴(Z轴)start输入 |
普通输入 |
|
|
X15 |
第3轴(Z轴)stop输入 |
普通输入 |
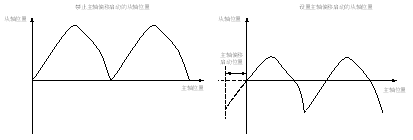
主轴偏移启动
通过主轴偏移启动功能,可以实现在一个凸轮周期内,从轴在凸轮曲线的任意主轴位置开始啮合。
|
主轴偏移启动使能SM |
主轴偏移启动位置SD |
||||
|
X轴 |
Y轴 |
Z轴 |
X轴 |
Y轴 |
Z轴 |
|
SM68 |
SM168 |
SM268 |
SD68,SD69 |
SD168,SD169 |
SD268,SD269 |
|
OFF:禁止主轴偏移启动 |
– |
||||
|
ON:使能主轴偏移启动 |
主轴偏移启动位置,即开始啮合时的主轴位置,脉冲数 |
||||
DCAMSP 指令
概要
获取凸轮表从轴位置
| DCAMSP S1 S2 D |
获取凸轮表从轴位置指令 |
适用机型: |
|
|
S1 |
主轴位置 |
32位指令(13setp) 连续执行 |
|
|
S2 |
凸轮从轴轴号 |
||
|
D |
从轴位置 |
||
操作数
|
操作数 |
位软元件 |
字软元件 |
|||||||||||||||||||||
|
系统·用户 |
系统·用户 |
位数指定 |
变址 |
常数 |
实数 |
||||||||||||||||||
|
S1 |
X |
Y |
M |
T |
C |
S |
SM |
D |
R |
T |
C |
SD |
KnX |
KnY |
KnM |
KnS |
KnSM |
V |
Z |
修饰 |
K |
H |
E |
|
S2 |
X |
Y |
M |
T |
C |
S |
SM |
D |
R |
T |
C |
SD |
KnX |
KnY |
KnM |
KnS |
KnSM |
V |
Z |
修饰 |
K |
H |
E |
|
D |
X |
Y |
M |
T |
C |
S |
SM |
D |
R |
T |
C |
SD |
KnX |
KnY |
KnM |
KnS |
KnSM |
V |
Z |
修饰 |
K |
H |
E |
注:带灰色底纹软元件仅对应H3U可编程控制器。
功能和动作说明:
| S1 |
凸轮主轴位置,单位为脉冲数 [S1]的设定值应该在凸轮一个周期的主轴范围内 |
|
S2 |
凸轮从轴轴号,Y0、Y1、Y2分别对应第1轴(X轴)、第2轴(Y轴)、第3轴(Z轴) |
|
D |
根据[S1]设定的主轴位置,计算出[S2]使用的凸轮表对应的从轴位置 |
注:凸轮必须被啮合过才能获取有效从轴位置
使用举例:
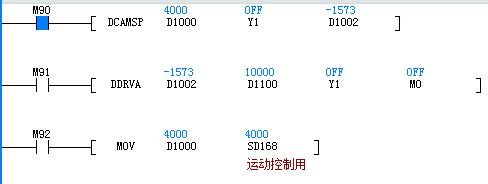
M90为ON时:通过DCAMSP指令获取主轴位置在4000时,Y1使用凸轮表对应的从轴位置。
M91为ON时:通过定位指令将从轴Y1定位到指定位置,此位置可根据DCAMSP指令返回的从轴位置计数得到。
M92为ON时:设置主轴偏移启动功能。凸轮使能后,从轴以此位置开始啮合。
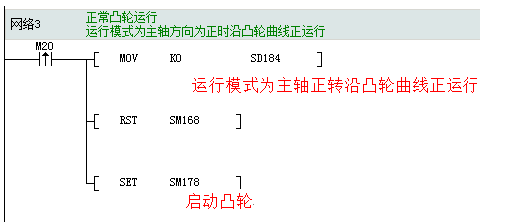
凸轮运行方式设定
通过运行方式设定,可以设定从轴在不同主轴方向时的运行模式。其中沿凸轮曲线正运行表示从轴跟随主轴信号,沿设定凸轮曲线运行;沿凸轮曲线逆运行表示从轴跟随主轴信号,沿设定凸轮曲线反向运行,即以凸轮曲线终点作为从轴运行起点,从轴逆凸轮曲线相对于凸轮曲线的终点运行。
|
凸轮运行方式设定SD |
||
|
X轴 |
Y轴 |
Z轴 |
|
SD84 |
SD184 |
SD284 |
|
0:主轴方向为正时沿凸轮曲线正运行 1:主轴方向为负时沿凸轮曲线正运行 2:主轴方向为正时沿凸轮曲线逆运行 3:主轴方向为负时沿凸轮曲线逆运行 |
||
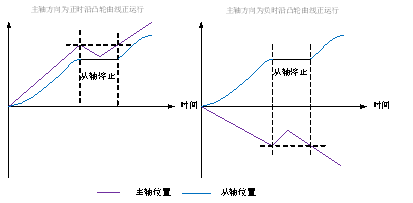
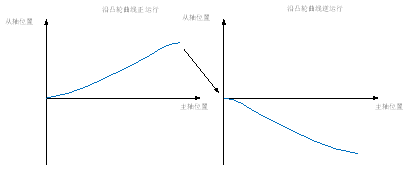
应用举例:
在某些应用场合,在凸轮正常运行时遇到异常情况,需要停止当前的运行,控制主轴反转,凸轮从轴沿凸轮曲线逆运行,排除异常后,控制主轴正转,凸轮从轴继续沿凸轮曲线正运行。
配合主轴偏移启动和凸轮运行方式功能,可实现上述功能:
1、启动凸轮正常运行
2、异常情况打开凸轮啮合

3、主轴反转沿凸轮曲线逆运行
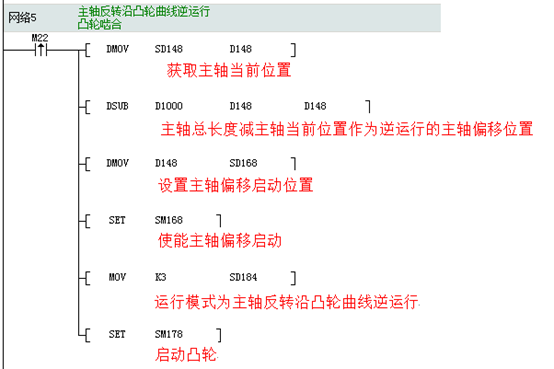
注意:沿凸轮的运行方式改变时,即正运行→逆运行或逆运行→正运行变化,且使用主轴偏移启动功能时,计算主轴偏移位置,需要将主轴总长度减主轴当前位置作为偏移启动位置。
计数器锁存
通过外部输入,可以内部锁存上升沿或下降沿时刻的计数器值。通过用户程序读取的锁存值,即为外部输入上升沿或下降沿时刻计数器的实时值,不受PLC扫描周期的影响。
计数器C252、C253支持锁存功能,对应外部输入为X6和X7。锁存值存放元件如下表:
| 计数器 |
端子 |
计数模式 |
计数器锁存输入 |
锁存值SD元件 |
|||
|
AB相 |
脉冲+方向 |
CW/CCW |
上升沿 |
下降沿 |
|||
|
C252 |
X0 |
A相输入 |
脉冲输入 |
CW脉冲输入 |
X6 |
SD65,SD64 |
SD67,SD66 |
|
X1 |
B相输入 |
方向输入 |
CCW脉冲输入 |
||||
|
C253 |
X2 |
A相输入 |
脉冲输入 |
CW脉冲输入 |
X7 |
SD165,SD164 |
SD167,SD166 |
|
X3 |
B相输入 |
方向输入 |
CCW脉冲输入 |
||||
|
C254 |
X4 |
A相输入 |
脉冲输入 |
CW脉冲输入 |
无 |
无 |
|
|
X5 |
B相输入 |
方向输入 |
CCW脉冲输入 |
||||
使用计数器锁存功能时,需要添加中断子程序,设置X6或X7的上升沿或下降沿中断。
计数器模数功能
计数器可通过特殊SM元件设置为模数功能,计数器设置为模式功能时,计数器的值在模数值内变化。
|
模数功能使能SM |
||
|
C252 |
C253 |
C254 |
|
SM2 |
SM102 |
SM202 |
|
OFF:普通计数模式 ON:模数模式 |
||
|
模数值 |
||
|
C252 |
C253 |
C254 |
|
SD2,SD3 |
SD102,SD103 |
SD202,SD203 |
|
计数器运行在模数模式下的模数值 |
||
计数器值变化范围
普通计数模式:-2,147,483,648 ~ +2,147,483,647,
模数模式:0
~ (模数值 – 1),循环计数。
在普通计数模式下需要设置为模数模式,若计数器当前值大于模数值,切换为模数模式并使能计数器后,计数器以原来值取模后的余数开始计数。
例:若计数器当前值为1234,模数值设置为1000,切换为模数模式后从234开始计数。
主轴位置值
凸轮运行时,从轴对应的主轴当前位置可以通过SD元件获取。
|
主轴位置值 |
||
|
X轴 |
Y轴 |
Z轴 |
|
SD48,SD49 |
SD148,SD149 |
SD248,SD249 |
主轴位置值寄存器按凸轮曲线周期变化,表示凸轮从轴运行时对应的主轴当前位置。
凸轮启动时,若未使能主轴偏移启动,主轴位置从0开始;若使用主轴偏移启动,主轴位置从偏移位置开始。
若程序中使用X0~X7的边沿中断,系统在中断发生时会立即刷新凸轮主轴位置值,因此在外部输入中断子程序中使用主轴位置为实时值,不受扫描周期影响。
虚轴
凸轮主轴可选择为内部虚拟连接或外部输入,使用内部虚拟连接时,可选择为X轴输出内部连接或内部虚拟主轴连接。使用X轴输出内部连接时,以X轴的输出内部连接作为凸轮主轴输入;使用内部虚拟连接,内部虚拟脉冲作为凸轮主轴输入。
|
主轴选择设置SM |
主轴选择SD |
||||
|
X轴 |
Y轴 |
Z轴 |
X轴 |
Y轴 |
Z轴 |
|
SM71 |
SM171 |
SM271 |
SD71 |
SD171 |
SD271 |
|
OFF:内部虚拟连接 |
0:内部虚拟主轴连接 1:X输出轴内部连接 |
||||
|
ON:外部输入 |
1:X输入通道 2:Y输入通道 3:Z输入通道 |
||||
虚拟主轴频率和启停控制:
|
SD86,SD85 |
32位,虚拟主轴频率,0~200KHz;设置小于或等于0时,默认主轴停止;设置大于200KHz时,默认为200KHz运行。 |
|
SM85 |
ON:虚拟主轴运行; OFF:虚拟主轴停止;若设置无减速,虚轴直接停止;若设置有减速,虚轴减速到基地频率后停止。 |
|
SD186,SD185 |
虚轴加减速基底频率。 设定值大于(SD86,SD85)时,直接以(SD86,SD85)无加减速运行; 设定值小于0时,系统自动默认为1000; |
|
SD285 |
虚轴加速度,Hz/ms,表示每ms的虚轴频率增加值 设置小于等于0表示无加速 |
|
SD286 |
虚轴减速度,Hz/ms,表示每ms的虚轴频率减少值 设置小于等于0表示无减速 |
|
SD88,SD87 |
虚拟主轴当前运行频率 |
注:虚轴速度在加减速期间的变化最小周期为1ms,若PLC扫描周期大于1ms,虚轴速度在加减速期间每个扫描周期变化一次。
在运行中可以直接修改(SD86,SD85)值改变虚轴速度。
凸轮脉冲输出屏蔽
通过设置特殊SM元件,可以屏蔽凸轮脉冲输出。
|
凸轮脉冲输出屏蔽SM |
||
|
X轴 |
Y轴 |
Z轴 |
|
SM62 |
SM162 |
SM262 |
|
OFF:凸轮脉冲正常输出 ON:凸轮脉冲输出屏蔽 |
||
凸轮脉冲输出屏蔽SM在凸轮使能(SM78、SM178、SM278)前设置有效;凸轮使能后,仅通过比较指令(DHSOS、DHSOR)设置有效,直接设置SM无效。
例:使用DHSOS和DHSOR指令和凸轮主轴位置比较,比较结果置位或复位SM62可以屏蔽或恢复X轴凸轮脉冲输出。控制好指令的逻辑时序可实现任意周期的脉冲屏蔽。
如在高速中需屏蔽脉冲输出,需提前减速。
<
p style=”text-align: center”>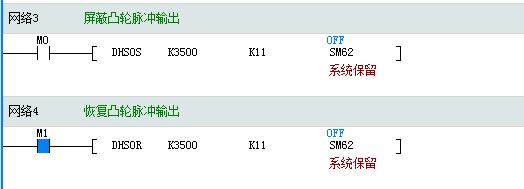
凸轮速度
|
凸轮从轴速度比大于0时的最大值 |
||
|
X轴 |
Y轴 |
Z轴 |
|
SD74,SD75 |
SD174,SD175 |
SD274,SD275 |
|
凸轮从轴速度比大于0时的最大值 |
||
|
凸轮从轴速度比小于0时的最小值 |
||
|
X轴 |
Y轴 |
Z轴 |
|
SD76,SD77 |
SD176,SD177 |
SD276,SD277 |
|
凸轮从轴速度比小于0时的最小值 |
||
转载请注明:燕骏博客 » 汇川技术小型PLC-H3U运动控制功能说明文档
赞赏作者 微信赞赏
微信赞赏 支付宝赞赏
支付宝赞赏