MC_STOP与MC_halt:
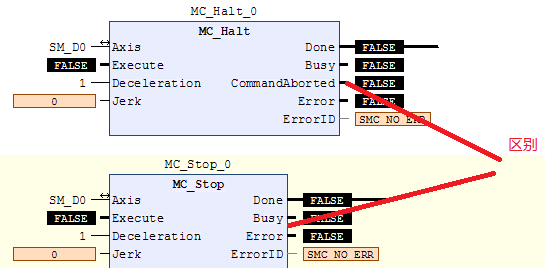
MC_Stop 将会使控制器停止并且将轴的状态设置为stopping状态。继续处理的功能块将会被终止。当轴的状态为stopping时,其他功能块将不会被允许对轴进行任何操作。当轴达到速度零,输出Done将会被立即设置为 TRUE 并且只要输入Execute 一直为 TRUE轴继续在状态stopping。如果Execute 为 FALSE 并且 Done 为 TRUE,那么轴将会到达 standstill状态。
MC_Halt控制一个被控制的轴停止。MC_Halt能终止一切运动处理功能块。速度为0输出 DONE 被置位 TRUE,状态将转化为"StandStill"。MC_Halt能被其他指令中断,这是与MC_Stop指令的不同。
运行中暂停功能:暂时没有相关指令,通过计算位移可以实现同样的效果。